
Робот-пилосос своїми руками Ардуіно виготовляється з підручних матеріалів. Устаткування здатне переміщатися по кімнаті, змінювати напрямок руху після контакту з сторонніми предметами і видаляти пил з поверхні підлоги.
необхідні компоненти
Для збірки пилососа на Ардуіно потрібні компоненти:
процес складання
Покроковий процес складання робота-пилососа Ардуіно:
- Розкласти компоненти конструкції майбутнього виробу на рівній поверхні для визначення взаємного розташування і розмірів тіла.
- Вирізати з картону кругле підставу.
- Виконати на деталі прорізи для бічних коліс, які розташовуються по поперечної осі симетрії.
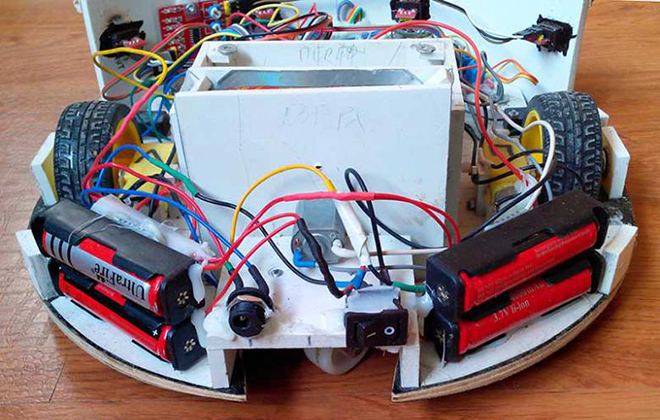
- Закріпити електричні приводи коліс пластиковими хомутами до корпусу.
- Прорізати канал для забору повітря і зафіксувати клеєм турбіну над отриманим вікном. Вузол кріпиться на протилежній від двигунів ходової частини стороні піддона.
- Розмаїття зону установки контейнера для пилу, який розміщується над вікном з роторним робочим колесом.
- Встановити і закріпити термічним клеєм на внутрішній частині магніти (по попередньо розміченому контуру резервуара для пилу). Відповідні магнітні елементи розміщуються через аркуш паперу на протилежному боці піддону. Ємність для пилу приклеюється до магнітів, які щільно притискаються до бічної поверхні резервуара. Аркуш паперу видаляється, коробка утримується на запланованій монтажної точці взаємним тяжінням магнітів.
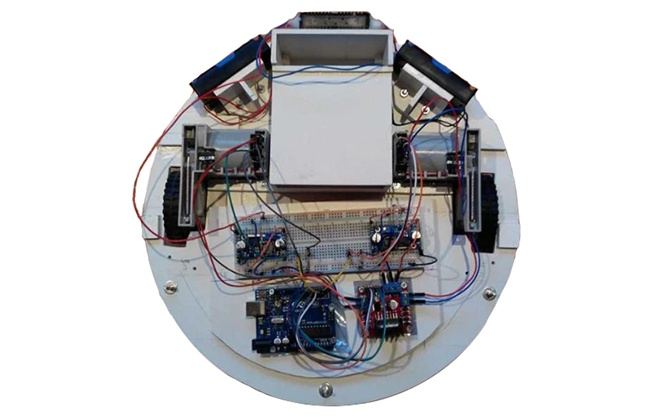
- Закріпити на верхній площині піддону акумуляторну батарею і контролер Ардуіно. Допускається установка елементів в напрямні вузли, виготовлені з деревини або пластику. Користувачі використовують стандартні блоки управління Ардуіно, частина власників самостійно коригує прошивку мікропроцесора шляхом підключення виробу до комп’ютера.
- Розмістити блок H-Bridge поверх контролера і з’єднати електроніку пилососа з акумулятором. Для з’єднання кабелів застосовується пайка і установка комутаційних штекерів.
- Підключити електричні двигуни до висновків блоків управління.
- Вирізати картонні заготовки для фронтального бампера. Деталі монтуються на передній частині корпусу, точка з’єднання допускає переміщення бампера після зіткнення робота з перешкодою.
- Припаяти відрізки кабелю до прямокутним бляшаним пластин (потрібно виготовити 2 елементи). Металеві пластинки встановлюються на відстані від внутрішньої сторони імпровізованих бамперів. На внутрішній поверхні бампера наклеюється фольга, на яку подається позитивна напруга від батареї. При зіткненні пластинка з’єднується з фольгою і працює як датчик перешкоди. У сигнальної ланцюга від пластини встановлюється додатковий опір, знижує ризик помилкових спрацьовувань.
Для очищення повітря від пилу застосовується фрагмент від кухонної серветки, виготовленої з волокнистого синтетичного матеріалу. Елемент встановлюється під підставою контейнера пилозбірника і утримується магнітами. У самому контейнері прорізається прямокутний канал, через який затягується повітря з пилом. Для регулювання зазору між резервуаром і покриттям підлоги застосовується змінне дистанційне кільце з картону або пробки.




